Устройство синхронного двигателя
Содержание:
- Способы возбуждения синхронных генераторов
- Citroen Berlingo, 2015 г.
- Регулирование частоты вращения асинхронных двигателей
- Конструкции и типы синхронного электродвигателя с постоянными магнитами
- Фазовые колебания
- Запуск установки
- Синхронные двигатели: устройство и принцип действия
- Как работает синхронный двигатель
- Способы пуска
- Определение и принцип действия
- Основные отличия
- Пуск синхронного двигателя
- Сфера применения
- Какой смысл в штрафе за «вафельницу»
Способы возбуждения синхронных генераторов
Самым распространенным способом создания основного магнитного потока синхронных генераторов является электромагнитное возбуждение, состоящее в том, что на полюсах ротора располагают обмотку возбуждения, при прохождении по которой постоянного тока, возникает МДС, создающая в генераторе магнитное поле.
До последнего времени для питания обмотки возбуждения применялись преимущественно специальные генераторы постоянного тока независимого возбуждения, называемые возбудителями В (рис. 1.3, а). Обмотка возбуждения (ОВ) получает питание от другого генератора (параллельного возбуждения), называемого подвозбудителем (ПВ).
Ротор синхронного генератора, возбудителя и подвозбудителя располагаются на общем валу и вращаются одновременно. При этом ток в обмотку возбуждения синхронного генератора поступает через контактные кольца и щётки. Для регулирования тока возбуждения применяют регулировочные реостаты, включаемые в цепи возбуждения возбудителя r1 и подвозбудителя r2 .
В синхронных генераторах средней и большой мощности процесс регулирования тока возбуждения автоматизируют.
В синхронных генераторах получила применение также бесконтактная система электромагнитного возбуждения, при которой синхронный генератор не имеет контактных колец на роторе. В качестве возбудителя в этом случае применяют обращенный синхронный генератор переменного тока В (рис. 1.3, б). Трехфазная обмотка 2 возбудителя, в которой наводится переменная ЭДС, расположена на роторе и вращается вместе с обмоткой возбуждения синхронного генератора и их электрическое соединение осуществляется через вращающийся выпрямитель 3 непосредственно, без контактных колец и щёток. Питание постоянным током обмотки возбуждения 1 возбудителя В осуществляется от подвозбудителя ПВ – генератора постоянного
тока. Отсутствие скользящих контактов в цепи возбуждения синхронного генератора позволяет повысить её эксплуатационную надёжность и увеличить КПД.
В синхронных генераторах, в этом числе гидрогенераторах, получил распространение принцип самовозбуждения (рис. 1.4, а), когда
энергия переменного тока, необходимая для возбуждения, отбирается от обмотки статора синхронного генератора и через понижающий
трансформатор и выпрямительный полупроводниковый преобразователь ПП преобразуется в энергию постоянного тока. Принцип самовозбуждения основан на том, что первоначальное возбуждение генератора происходит за счёт остаточного магнетизма машины.
На рис. 1.4, б представлена структурная схема автоматической системы самовозбуждения синхронного генератора (СГ) с выпрямительным трансформатором (ВТ) и тиристорным преобразователем (ТП), через которые электроэнергия переменного тока из цепи статора СГ после преобразования в постоянный ток подаётся в обмотку возбуждения. Управление тиристорным преобразователем осуществляется посредством автоматического регулятора возбуждения АРВ, на вход которого поступают сигналы напряжения на входе СГ (через трансформатор напряжения ТН) и тока нагрузки СГ (от трансформатора тока ТТ). Схема содержит блок защиты (БЗ), обеспечивающий защиту обмотки возбуждения (ОВ) от перенапряжения и токовой перегрузки.
Мощность, затрачиваемая на возбуждение, обычно составляет от 0,2 до 5 % полезной мощности (меньшее значение относится к генераторам большой мощности).
В генераторах малой мощности находит применение принцип возбуждения постоянными магнитами, расположенными на роторе машины. Такой способ возбуждения даёт возможность избавить генератор от обмотки возбуждения. В результате конструкция генератора существенно упрощается, становится более экономичной и надёжной. Однако, из-за высокой стоимости материалов для изготовления постоянных магнитов с большим запасом магнитной энергии и сложности их обработки применение возбуждения постоянными магнитами ограничено машинами мощностью не более нескольких киловатт.
Синхронные генераторы составляют основу электроэнергетики, так как практически вся электроэнергия во всём мире вырабатывается посредством синхронных турбо- или гидрогенераторов.
Так же синхронные генераторы находят широкое применение в составе стационарных и передвижных электроустановок или станций в комплекте с дизельными и бензиновыми двигателями.
Citroen Berlingo, 2015 г.
Регулирование частоты вращения асинхронных двигателей
Для регулирования частоты вращения асинхронных электродвигателей и управления режимами их работы существуют следующие способы:
- Частотный – при изменении частоты тока в электрической сети изменяется частота вращения электрического двигателя. Для такого способа применяют устройство, которое называется частотный преобразователь;
- Реостатный – при изменении сопротивления реостата в роторе, изменяется частота вращения. Такой способ увеличивает пусковой момент и критическое скольжение;
- Импульсный – способ управления, при котором на двигатель подается напряжение специального вида.
- Переключение обмоток по время работы электрического двигателя со схемы «звезда» на схему «треугольник», что снижает пусковые токи;
- Управление с изменения пар полюсов для короткозамкнутых роторов;
- Подключение индуктивного сопротивления для двигателей с фазным ротором.
С развитием электронных систем, управление различными электродвигателями асинхронного типа становится все более эффективным и точным. Такие двигатели используются в мире повсеместно, разнообразие задач, выполняемых такими механизмами, с каждым днем растет, и потребность в них не уменьшается.
Конструкции и типы синхронного электродвигателя с постоянными магнитами
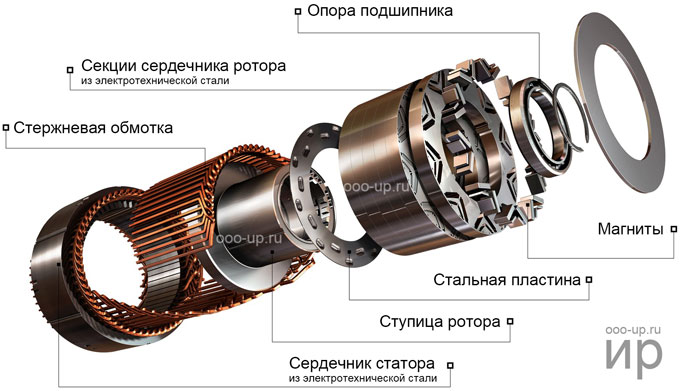
Синхронный электродвигатель с постоянными магнитами, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть.
Синхронный электродвигатель со встроенными постоянными магнитами
Обычно ротор располагается внутри статора электродвигателя, также существуют конструкции с внешним ротором — электродвигатели обращенного типа.
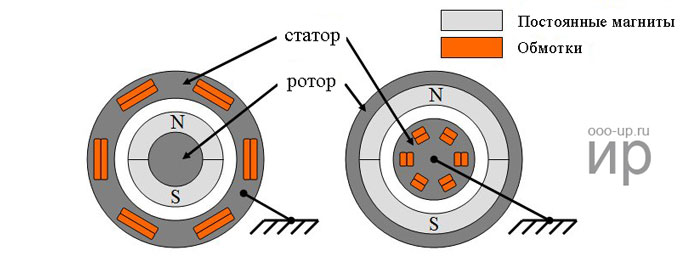 Конструкции синхронного двигателя с постоянными магнитами: слева — стандартная, справа обращенная.
Конструкции синхронного двигателя с постоянными магнитами: слева — стандартная, справа обращенная.
Ротор состоит из постоянных магнитов. В качестве постоянных магнитов используются материалы с высокой коэрцитивной силой.
- По конструкции ротора синхронные двигатели делятся на:
- электродвигатели с явно выраженными полюсами;
- электродвигатели с неявно выраженными полюсами.
Электродвигатель с неявно выраженными полюсами имеет равную индуктивность по продольной и поперечной осям Ld = Lq, тогда как у электродвигателя с явно выраженными полюсами поперечная индуктивность не равна продольной Lq ≠ Ld.
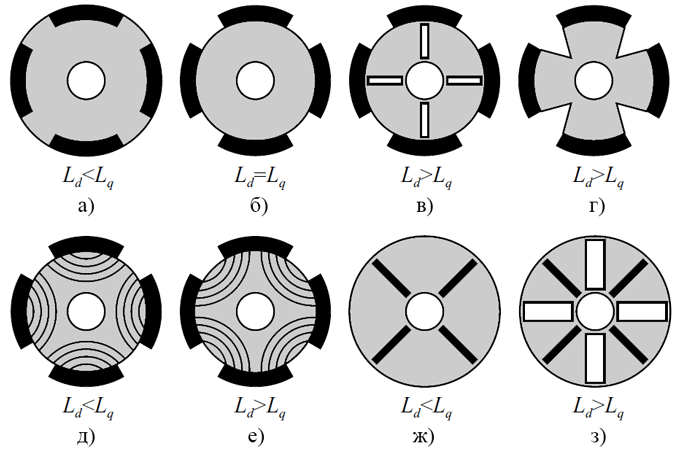 Сечение роторов с разным отношением Ld/Lq. Черным обозначены магниты. На рисунке д, е представлены аксиально-расслоенные роторы, на рисунке в и з изображены роторы с барьерами.
Сечение роторов с разным отношением Ld/Lq. Черным обозначены магниты. На рисунке д, е представлены аксиально-расслоенные роторы, на рисунке в и з изображены роторы с барьерами.
- Также по конструкции ротора СДПМ делятся на:
- синхронный двигатель c поверхностной установкой постоянных магнитов(англ. SPMSM — surface permanent magnet synchronous motor);
- синхронный двигатель со встроенными (инкорпорированными) магнитами(англ. IPMSM — interior permanent magnet synchronous motor).
Ротор синхронного двигателя c поверхностной установкой постоянных магнитов
Ротор синхронного двигателя со встроенными магнитами
Статор состоит из корпуса и сердечника с обмоткой. Наиболее распространены конструкции с двух- и трехфазной обмоткой.
- В зависимости от конструкции статора синхронный двигатель с постоянными магнитами бывает:
- с распределенной обмоткой;
- с сосредоточенной обмоткой.

Статор электродвигателя с распределенной обмоткой

Статор электродвигателя с сосредоточенной обмоткой
Распределенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 2, 3,…., k.
Сосредоточенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 1. При этом пазы расположены равномерно по окружности статора. Две катушки, образующие обмотку, можно соединить как последовательно, так и параллельно. Основной недостаток таких обмоток — невозможность влияния на форму кривой ЭДС .
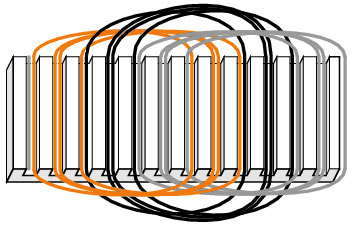
Схема трехфазной распределенной обмотки
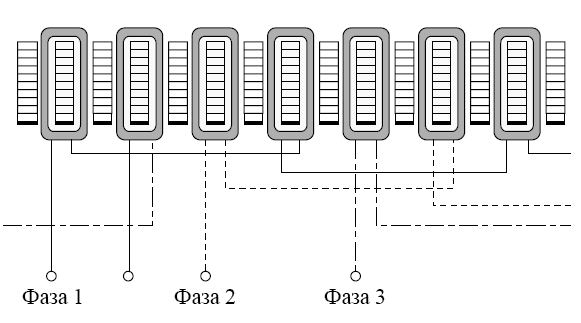
Схема трехфазной сосредоточенной обмотки
Форма обратной ЭДС электродвигателя может быть:
трапецеидальная;
синусоидальная.
Форма кривой ЭДС в проводнике определяется кривой распределения магнитной индукции в зазоре по окружности статора.
Известно, что магнитная индукция в зазоре под явно выраженным полюсом ротора имеет трапециидальную форму. Такую же форму имеет и наводимая в проводнике ЭДС. Если необходимо создать синусоидальную ЭДС, то полюсным наконечникам придают такую форму, при которой кривая распределения индукции была бы близка к синусоидальной. Этому способствуют скосы полюсных наконечников ротора .
Фазовые колебания
Раскачка фазы синхронного двигателя вызваны:
- Различными нагрузками
- Пульсирующими частотами питания.
Когда синхронный двигатель нагружен (например, компрессоры, насосы и т.д.). Когда нагрузка увеличивается, его ротор возвращается назад на угол соединения «β». При дальнейшем увеличении нагрузки этот угол «β» дополнительно увеличивается, чтобы справиться с возросшей нагрузкой. В этой ситуации, если нагрузка внезапно уменьшается, ротор перегружается, а затем оттягивается, чтобы приспособить новую нагрузку к двигателю. Таким образом, ротор начинает колебаться, как маятник, в своем новом положении, соответствующем его новой нагрузке, пытаясь восстановить равновесие. Если период времени этих колебаний совпадает с собственной частотой станка, то устанавливается резонанс, что может вывести машину из синхронизма. Для демпфирования таких колебаний используются «демпфирующие решетки», известные как «обмотки короткозамкнутых клеток».
Запуск установки
При использовании синхронных двигателей возникает масса трудностей на этапе их запуска. Из-за этого они не пользуются особой популярностью и уступают асинхронным вариантам.
С момента появления на рынке работа синхронных агрегатов обеспечивалась специальным асинхронником, который механически соединялся с остальными узлами. По сути, ротор разгонялся до нужной частоты с помощью второго типа моторов. Современные асинхронники не нуждаются в подключении дополнительных механизмов, и все, что требуется для их работы, — соответствующее напряжение для статорной обмотки.
Как только система обеспечит нужную скорость вращения, разгонный двигатель будет отключен. При этом магнитные поля из электрического мотора выведут его на работу в синхронном режиме. Чтобы разогнать установку, придется задействовать еще один мотор мощностью 10% от мощности синхронного двигателя. При разгоне электродвигателя на 1 кВт используют разгонную систему мощностью 100 Вт. Как утверждают специалисты, таких показателей вполне хватает для сбалансированной работы машины в холостом режиме или с небольшой нагрузкой.
Синхронные двигатели: устройство и принцип действия
Основные части синхронного двигателя – это якорь (статор, неподвижная часть) и индуктор (ротор), разделенные воздушной прослойкой. В пазы статора закладывают трехфазную распределенную обмотку – обычно она соединяется «звездой».
Рис. 2 Схема синхронного двигателя
С началом работы двигателя тока, подаваемые в якорь, создают вращение магнитного поля, которое пересекает поле индуктора, что в результате взаимодействия двух полей переходит в энергию. Поле якоря чаще называют иначе – поле реакции якоря. В генераторах такое получают при помощи индуктора. Входящие в состав индуктора электромагниты постоянного тока принято называть полюсами. При этом индукторы во всех синхронных двигателях могут исполняться по двум схемам – явнополюсной и неявнополюсной, различающиеся между собой расположением полюсов. Чтобы уменьшить значение магнитного сопротивления и тем самым улучшить условия для прохождения магнитного потока, применяют ферромагнитные сердечники. Они располагаются в статоре и роторе, для их изготовления используют специальную марку стали – электротехническую, отличающую высоким содержанием кремния – это позволяет уменьшить вихревые токи и повысить электрическое сопротивление стали.
Рис. 3. Магнитные поля в синхронном двигателе
В основу работы синхронного двигателя положен принцип взаимного влияния полюсов индуктора и магнитного поля, индуцируемого якорем. При запуске осуществляется разгон двигателя до частоты, которая близка по своему значению частоте, с которой происходит в зазоре вращение магнитного поля. Только при выполнении этого условия двигатель переходит в функционирование в синхронном режиме. В данный момент пересекаются магнитные поля, инициируемые индуктором и ротором. Этот момент в технической литературе принято называть входом в синхронизацию.
Работа синхронного двигателя наглядно представлена на видео:
Длительное время в качестве разгонного двигателя использовался стандартный синхронный двигатель, который был механически соединен с синхронным. Благодаря этому, ротор на синхронном двигателе механически разгонялся до подсинхронной скорости, а затем уже самостоятельно, за счет взаимодействия электромагнитных полей, втягивался в синхронизм. Обычно при подборе мощности пускового двигателя исходили из соотношения 10-15% от номинальной мощности разгоняемого двигателя. Такого запаса мощности вполне хватало запустить синхронный двигатель не только в холостую, но даже и при незначительной нагрузке на валу.
Рис. 4 Синхронный двигатель (1) с внешним разгонным (2) двигателем
Такой способ разгона усложняет и существенно удорожает общую стоимость, поэтому в современных двигателях от него отказались в пользу разгона в состоянии асинхронного режима. В этом случае с помощью реостата (короткозамкнутым путем) обмотки индуктора замыкают, как в асинхронном двигателе. Чтобы провести запуск двигателя в таком режиме, на ротор устанавливают короткозамкнутую обмотку, выступающую одновременно и как успокоительная обмотка, устраняющая во время проведения синхронизации раскачивание ротора. В момент, когда скорость вращения достигнет требуемого номинального значения, в индуктор будет подан постоянный ток. Но для двигателей, в которых стоят постоянные магниты, все равно придется для разгона использовать внешние двигатели.
В криогенных синхронных машинах используется так называемая обращенная конструкция, при которой размещение индуктора и якоря выполнено наоборот, т.е. индуктор расположен на статоре, а якорь – на роторе. В таких машинах обмотки возбуждения состоят из материалов, обладающими свойствами сверхпроводимости.
Как работает синхронный двигатель
Принцип действия синхронного двигателя основывается на взаимном влиянии магнитных полей якоря и полюсов индуктора. При обращенной конструкции агрегата расположение якоря и индуктора выполнено наоборот, то есть, первый расположен на роторе, а другой – на статоре. Такой вариант используют криогенные синхронные машины, у которых в состав обмоток возбуждения входят материалы со свойствами сверхпроводимости.
При запуске двигателя его разгоняют до частоты близкой к той, с которой в зазоре вращается магнитное поле. Только после этого он переходит в синхронный режим. В данной ситуации происходит пересечение магнитных полей якоря и индуктора. Этот момент получил название входа в синхронизацию.
При разгоне используется состояние асинхронного режима, когда происходит замыкание обмоток индуктора с помощью реостата или короткозамкнутым путем, подобно асинхронным машинам. Для того, чтобы осуществлять запуск в таком режиме, ротор оснащается короткозамкнутой обмоткой, которая одновременно является успокоительной обмоткой, способной устранить раскачивание ротора во время синхронизации. После того, как скорость становится близко к номинальной, в индуктор подается постоянный ток.
Таким образом, синхронный двигатель это не только двигатель, но и своеобразный генератор, поскольку у них одинаковое конструктивное исполнение. Схема работы двигателя будет следующей. Обмотка якоря подключается к трехфазному переменному току, а к обмотке возбуждения от постороннего источника подается постоянный ток. Вращающееся магнитное поле, созданное трехфазной обмоткой и поле, созданное обмоткой возбуждения, взаимодействуют между собой. Это вызывает появление электромагнитного момента, приводящего ротор во вращающееся состояние.
Для двигателей, где установлены постоянные магниты, применяются специальные внешние разгонные двигатели. В отличие от асинхронных устройств, разгон ротора в синхронном двигателе должен достигнуть частоты вращения магнитного поля. Это связано с подачей в обмотку ротора тока из постороннего источника, а не индуцируется в нем под действием магнитного поля статора, следовательно, на него не влияет частота вращения вала. В результате, синхронный двигатель переменного тока приобретает постоянную частоту вращения ротора вне зависимости от нагрузки. Специфический принцип работы этих устройств оказал влияние на их пуск и регулировку частоты вращения.
Способы пуска
За счет значительной инерции ротора он не способен сдвинуться под нагрузкой полем статора. В случае подачи рабочего напряжения не удастся получить устойчивую магнитную связь и вращение не начнется. Для решения этой задачи применяются способы запуска ротора до определенной скорости вращения. Как правило, это то число оборотов, которое приближается к значению в режиме синхронной работы.
Среди наиболее распространенных способов приведения синхронного двигателя в движение можно выделить:
- Асинхронный пуск – этот способ обеспечивается путем введения в конструкцию ротора стальных элементов в форме беличьей клетки. При подаче напряжения в клетке наводится ЭДС и возникает магнитное взаимодействие. Основным недостатком данного способа являются большие пусковые токи, в разы превышающие номинальный режим синхронного двигателя. Поэтому в схеме запуска используются реакторы или автотрансформаторы для снижения негативного воздействия.
- Частотный пуск – обеспечивается посредством частотных преобразователей. Которые снижают частоту питающего напряжения на рабочих обмотках. Это позволяет замедлить скорость вращения магнитного поля синхронного двигателя. Благодаря чему начинается вращение ротора.
- Двигательный пуск – для начала движения вал синхронного агрегата подсоединяется к разгонному двигателю. На этапе старта вращение обеспечивается от приводной электрической машины. Как только основной двигатель выйдет на подсинхронную скорость, разгонный агрегат выводится из работы.
Для каждого из способов используются соответствующие схемы и оборудование, позволяющие оптимизировать режим работы. Поэтому далее рассмотрим несколько характерных примеров для каждого способа запуска.
Асинхронный пуск
В этом способе используются синхронные двигатели специального типа, но скорость нарастания тока и его величину в рабочих обмотках принудительно снижают. Для этого устанавливаются реакторы или автотрансформаторы.
Как видите на схеме, в цепь питания каждой фазной обмотки синхронного двигателя устанавливается реактор. При включении контактора К2 напряжение подается на обмотки ток в реакторе не может вырасти скачкообразно. Поэтому пуск электродвигателя получается более плавным, чем в случае прямого включения. При разгоне электрической машины до подсинхронной скорости шунтирующий выключатель К1 выводит индуктивный элемент из цепи и агрегат работает в штатном режиме.
В данной схеме происходит автоматическое снижение напряжения на рабочих обмотках синхронного двигателя за счет автотрансформатора. Регулятор Р3 плавно повышает разность потенциалов до установившейся величины, ток при этом пропорционально нарастает. После достижения номинального момента, выключатель К1 зашунтирует автотрансформатор. Этот способ позволяет снижать пусковые токи со значительно большим усилием, чем в случае применения реакторов.
Частотный пуск
Основой современного частотного пуска являются схемы на полупроводниковых элементах, как правило, тиристорных преобразователях. Такие устройства снижают частоту изменения кривой напряжения, но практически не нарушают действующее значение.
Такой способ запуска сокращает время на разгон синхронного двигателя и снижает значение токовой нагрузки в момент пуска. Однако, современная схема частотного пуска имеет куда более сложную реализацию:
Двигательный пуск
Способ двигательного запуска предусматривает одновременную установку на один вал и синхронного, и разгонного двигателя. Старт вращения обеспечивает асинхронный разгонный электродвигатель, который легко набирает обороты под нагрузкой. Синхронный агрегат включается в работу при достижении подсинхронной скорости вращения.
Однако существенным недостатком такого способа является длительный промежуток времени от старта до момента вхождения электрической машины в синхронизм.
Источник
Определение и принцип действия
Если говорить простым языком, то синхронным называют электродвигатель, у которого скорость вращения ротора (вала) совпадает со скоростью вращения магнитного поля статора.
Кратко рассмотрим принцип действия такого электродвигателя — он основан на взаимодействии вращающегося магнитного поля статора, которое обычно создаётся трёхфазным переменным током и постоянного магнитного поля ротора.
Постоянное магнитное поле ротора создаётся за счет обмотки возбуждения или постоянных магнитов. Ток в обмотках статора создаёт вращающееся магнитное поле, тогда как ротор в рабочем режиме представляет собой постоянный магнит, его полюса устремляются к противоположным полюсам магнитного поля статора. В результате ротор вращается синхронно с полем статора, что и является его основной особенностью.
Напомним, что у асинхронного электродвигателя скорость вращения МП статора и скорость вращения ротора отличаются на величину скольжения, а его механическая характеристика «горбатая» с пиком при критическом скольжении (ниже его номинальной скорости вращения).
Скорость, с которой вращается магнитное поле статора, может быть вычислена по следующему уравнению:
f – частота тока в обмотке, Гц, p – количество пар полюсов.
Соответственно по этой же формуле определяется скорость вращения вала синхронного двигателя.
Большинство электродвигателей переменного тока, используемых на производстве, выполнены без постоянных магнитов, а с обмоткой возбуждения, тогда как маломощные синхронные двигатели переменного тока выполняются с постоянными магнитами на роторе.
Ток к обмотке возбуждения подводится за счет колец и щеточного узла. В отличие от коллекторного электродвигателя, где для передачи тока вращающейся катушке используется коллектор (набор продольно расположенных пластин), на синхронном установлены кольца поперек одного из концов статора.
Источником постоянного тока возбуждения в настоящее время являются тиристорные возбудители, часто называемые «ВТЕ» (по названию одной из серий таких устройств отечественного производства). Ранее использовалась система возбуждения «генератор-двигатель», когда на одном валу с двигателем устанавливали генератор (он же возбудитель), который через резисторы подавал ток в обмотку возбуждения.
Ротор почти всех синхронных двигателей постоянного тока выполняется без обмотки возбуждения, а с постоянными магнитами, они хоть и похожи по принципу действия на СД переменного тока, но по способу подключения и управления ими очень сильно отличаются от классических трёхфазных машин.
Одной из основных характеристик электродвигателя является механическая характеристика. Она у синхронных электродвигателей приближена к прямой горизонтальной линии. Это значит, что нагрузка на валу не влияет на его обороты (пока не достигнет какой-то критической величины).
Это достигается именно благодаря возбуждению постоянным током, поэтому синхронный электродвигатель отлично поддерживает постоянные обороты при изменяющихся нагрузках, перегрузках и при просадках напряжения (до определенного предела).
Ниже вы видите условное обозначение на схеме синхронной машины.
Основные отличия
В основном синхронные и асинхронные двигатели мало чем отличаются друг от друга. Ключевым отличием первых моделей является то, что вращение якоря осуществляется с такой же скоростью, как и вращение магнитного потока. При этом внутри установки встроена проволочная обмотка, передающая переменное напряжение, а не короткозамкнутый ротор, как у асинхронных устройств. Также отдельные конструкции оборудованы постоянными магнитами, но они существенно повышают стоимость двигателя.
При увеличении нагрузки скорость вращения ротора остается прежней. Именно такая особенность характеризует эту разновидность силовых установок. Ключевое требование к таким машинам выглядит следующим образом: количество полюсов у движущегося магнитного поля должно соответствовать числу полюсов электромагнита на роторе.
Пуск синхронного двигателя
Особенностью этого вида электрических машин является то, что его нельзя просто подключить к сети и ожидать его запуска. Кроме того, что для работы СД нужен не только источник тока возбуждения, у него и достаточно сложная схема пуска.
Запуск происходит как у асинхронного двигателя, а для создания пускового момента кроме обмотки возбуждения на роторе размещают и дополнительную короткозамкнутую обмотку «беличью клетку». Её еще называют «демпфирующей» обмоткой, потому что она повышает устойчивость при резких перегрузках.
Ток возбуждения в обмотке ротора при пуске отсутствует, а когда он разгоняется до подсинхронной скорости (на 3-5% меньше синхронной), подаётся ток возбуждения, после чего он и ток статора совершает колебания, двигатель входит в синхронизм и выходит на рабочий режим.
Для ограничения пусковых токов мощных машин иногда уменьшают напряжение на зажимах обмоток статора, подключив последовательно автотрансформатор или резисторы.
Пока синхронная машина запускается в асинхронном режиме к обмотке возбуждения подключаются резисторы, сопротивление которых превышает сопротивление самой обмотки в 5 — 10 раз. Это нужно чтобы пульсирующий магнитный поток, возникающий под действием токов, наводимых в обмотке при пуске, не замедлял разгон, а также чтобы не повредить обмотки из-за индуцируемыми в ней ЭДС.
Видов таких машин очень много, выше была описана конструкция синхронного электродвигателя переменного тока с обмотками возбуждения, как самого распространенного на производстве. Есть и другие типы, такие как:
- Синхронные двигатели с постоянными магнитами. Это различные электродвигатели, такие как PMSM – permanent magnet synchronous motor, BLDC – Brushless Direct Current и прочие. Отличия, между которыми, состоят в способе управления и форме тока (синусоидальная или трапецивиденая). Их еще называют бесколлекторными или бесщеточными двигателями. Используются в станках, радиоуправляемых моделях, электроинструменте и т.д. Они работают не напрямую от постоянного тока, а через специальный преобразователь.
- Шаговые двигатели — синхронные бесщеточные двигатели, у которых ротор точно удерживает заданное положение, их используют для позиционирование рабочего инструмента в ЧПУ станках и для управления различными элементами автоматических систем (например, положение дроссельной заслонки в автомобиле). Состоят из статора, в этом случае на нём расположены обмотки возбуждения, и ротора, который выполнен из магнито-мягкого или магнито-твёрдого материала. Конструктивно очень похожи на предыдущие типы.
- Реактивные.
- Гистерезисные.
- Реактивно-гистерезисные.
Последние три типа СД также не имеют щеток, они работают за счет особой конструкции ротора. У реактивных СД различают три их конструкции: поперечно-расслоенный ротор, ротор с явновыраженными полюсами и аксиально-расслоенный ротор. Объяснение принципа их работы достаточно сложно, и займет большой объём, поэтому мы опустим его. Такие электродвигатели на практике вы, скорее всего, встретите нечасто. В основном это маломощные машины, используемые в автоматике.
Сфера применения
Асинхронный электродвигатель нашел применение во всех сферах деятельности человека. Те что питаются от одной фазы (от 220В) можно встретить в исполнительных механизмах малой мощности или в бытовой технике и инструменте, например:
- в стиральной машине типа «малютка» и других старых советских моделей;
- в бетономешалке;
- в вентиляторе;
- в вытяжке;
- и даже в газонокосилках верхнего ценового сегмента.
На производстве в трёхфазных сетях:
- автоматические задвижки;
- грузоподъёмные механизмы (краны и лебедки);
- вентиляция;
- компрессоры;
- насосы;
- дерево- и металообрабатывающие станки и другое.
Также АД используется в электротранспорте, а в последнее время в интернете активно рекламируют асинхронный двигатель с обмоткой типа «Славянка» и, так называемое, мотор-колесо Дуюнова, о чем вы можете узнать из видеоролика разработчика.
Область применения асинхронных двигателей настолько обширна, что один только список будет длиннее чем эта статья, поэтому каждый электрик должен знать, как он устроен, для чего нужен и где применяется. Подведем итоги и перечислим плюсы и минусы этих устройств.
Плюсы:
- Простая конструкция.
- Низкая стоимость.
- Почти не требуют обслуживания.
Главный недостаток — сложность регулировки оборотов, по сравнению с теми же двигателями постоянного тока или универсальными коллекторными машинами. Соответственно и сложно организовать плавный пуск больших машин, и чаще это делают с помощью дорогого частотного преобразователя.
На этом мы и заканчиваем рассмотрение асинхронных электродвигателей и их области применения. Надеемся, после прочтения статья вам стало понятно, что это такое и как работает данная электрическая машина!
Материалы по теме:
- Как выбрать частотный преобразователь по мощности и току
- Отличие переменного тока от постоянного
- Фазное и линейное напряжение
Опубликовано:
23.04.2019
Обновлено: 23.04.2019
Какой смысл в штрафе за «вафельницу»
В целом, оштрафовать водителей за нарушение правил проезда на перекрестке могли уже давно. В ст. 12.13 КоАП указано, что в случае, если водитель создает своими действиями или бездействием препятствие для проезда других машин, благодаря которым создается пробка, инспектор ГИБДД имеет все основания для вынесения штрафа. Проблема заключалась в том, что зафиксировать правонарушение можно было только в местах с камерами фото- и видеонаблюдения. Доказать вину водителя в данном случае было практически невозможно без прямых доказательств. Теперь положение исправлено благодаря «желтой сетке».
В нововведении есть экономический смысл: разметка призвана снизить заторы на перекрестках с повышенным трафиком. Так, например, на Лубянской площади в Москве даже в час пик утром нет задержек благодаря «вафле».
Интересная информация! В 2018 г. в рамках эксперимента разметка была нанесена на 79 столичных перекрестках. Было замечено, что, в целом, скорость движения на московских дорогах, по данным Департамента транспорта, после нововведения увеличилась на 80% утром в час пик и на 15% вечером. Поэтому говорить об эффективности нововведения не приходится – цифры говорят сами за себя.
Сетчатая разметка позволяет:
- сократить число пробок из-за столпотворения машин на наиболее загруженных местах дорог;
- снизить аварийность;
- повысить внимательность водителей;
- снизить времязатраты инспекторов ГИБДД на проведение дорожной экспертизы.
Новый дорожный знак «Участок перекрестка»
Некоторые эксперты, впрочем, считают, что вина зачастую лежит не только на плечах водителя: из-за несовершенства городской инфраструктуры правильный проезд перекрестков, порой, представляется затруднительным. Кроме того, неопытные водители, которые не умеют рассчитывать время проезда, находятся в зоне особого риска, пока не научатся хорошо прогнозировать динамично изменяющуюся дорожную обстановку.